Antonio Terpin.
I'm an aspiring full-stack scientist, currently a PhD student with Raff D'Andrea and Simone Schürle at ETH Zürich. Ever since I was a kid I have been broadly interested in computer science, physics, robotics, and mathematical puzzles. I love science and engineering — currently, working on AI for science with a focus on active fluid control.
I completed my M.Sc. in Robotics, Systems and Control at ETH Zürich in 2023 with a focus on optimization and optimal transport. For my work I was awarded the ETH Medal, Willi Studer Prize, and the ASRO/SVO award.
I used to play football, now I enjoy running (marathon time: 3h 30 min), cycling on the Alps, skiing, and much more. I recently got obsessed with Bachata. Otherwise, I like to read and build things.

Active control of fluid flows remains one of the most compelling open frontiers in physical intelligence: it sits at the intersection of infinite-dimensional dynamical systems, partial observation, learning, control, and real-world experimentation. Yet progress has been constrained by the absence of affordable, reproducible experimental platforms that let ideas move rapidly between theory, simulation, and hardware.
We treat the testbed not as the final contribution, but as an enabling substrate for a broader research agenda: developing methods that can learn, reason, and control complex fluid systems from limited interaction and imperfect sensing.
Featured.
- A. Terpin, R. D'Andrea
Abstract ↓
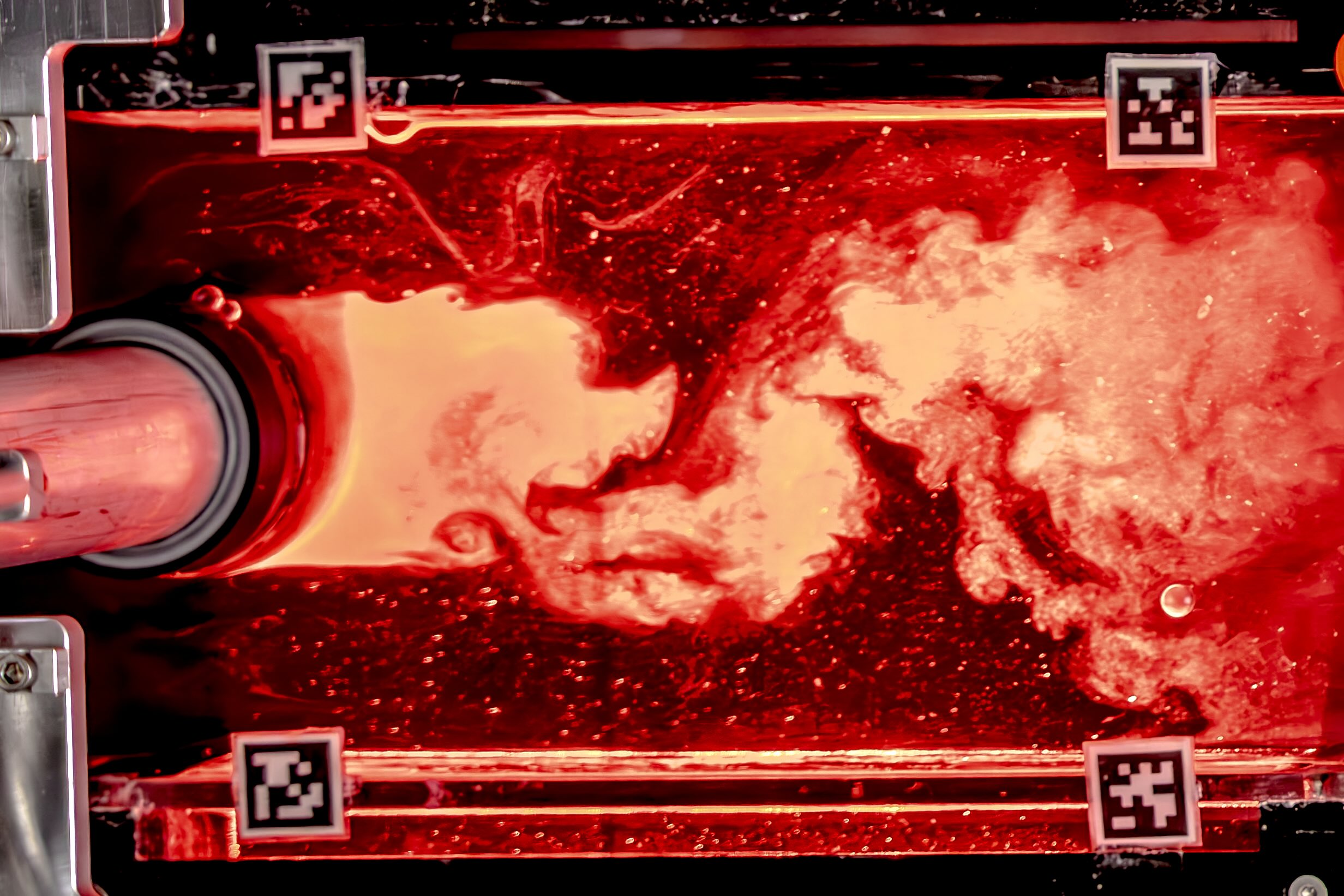
Many high-performance human activities are executed with little or no external feedback: think of a figure skater landing a triple jump, a pitcher throwing a curveball for a strike, or a barista pouring latte art. To study the process of skill acquisition under fully controlled conditions, we bypass human subjects. Instead, we directly interface a generalist reinforcement learning agent with a spinning cylinder in a tabletop circulating water channel to maximize or minimize drag. This setup has several desirable properties. First, it is a physical system, with the rich interactions and complex dynamics that only the physical world has: the flow is highly chaotic and extremely difficult, if not impossible, to model or simulate accurately. Second, the objective — drag minimization or maximization — is easy to state and can be captured directly in the reward, yet good strategies are not obvious beforehand. Third, decades-old experimental studies provide recipes for simple, high-performance open-loop policies. Finally, the setup is inexpensive and far easier to reproduce than human studies. In our experiments we find that high-dimensional flow feedback lets the agent discover high-performance drag-control strategies with only minutes of real-world interaction. When we later replay the same action sequences without any feedback, we obtain almost identical performance. This shows that feedback, and in particular flow feedback, is not needed to execute the learned policy. Surprisingly, without flow feedback during training the agent fails to discover any well-performing policy in drag maximization, but still succeeds in drag minimization, albeit more slowly and less reliably. Our studies show that learning a high-performance skill can require richer information than executing it, and learning conditions can be kind or wicked depending solely on the goal, not on dynamics or policy complexity.
- Oral · Top 0.39%Learning diffusion at lightspeed NeurIPS 2024A. Terpin, N. Lanzetti, M. Gadea, F. Dörfler
Abstract ↓
Diffusion regulates numerous natural processes and the dynamics of many successful generative models. Existing models to learn the diffusion terms from observational data rely on complex bilevel optimization problems and model only the drift of the system. We propose a new simple model, JKOnet*, which bypasses the complexity of existing architectures while presenting significantly enhanced representational capabilities: JKOnet* recovers the potential, interaction, and internal energy components of the underlying diffusion process. JKOnet* minimizes a simple quadratic loss and outperforms other baselines in terms of sample efficiency, computational complexity, and accuracy. Additionally, JKOnet* provides a closed-form optimal solution for linearly parametrized functionals, and, when applied to predict the evolution of cellular processes from real-world data, it achieves state-of-the-art accuracy at a fraction of the computational cost of all existing methods. Our methodology is based on the interpretation of diffusion processes as energy-minimizing trajectories in the probability space via the so-called JKO scheme, which we study via its first-order optimality conditions.
- Oral · Top 1%P. Grontas*, A. Terpin*, E.C. Balta, R. D'Andrea, J. Lygeros
Abstract ↓
We introduce an output layer for neural networks that ensures satisfaction of convex constraints. Our approach, Πnet, leverages operator splitting for rapid and reliable projections in the forward pass, and the implicit function theorem for backpropagation. We deploy Πnet as a feasible-by-design optimization proxy for parametric constrained optimization problems and obtain modest-accuracy solutions faster than traditional solvers when solving a single problem, and significantly faster for a batch of problems. We surpass state-of-the-art learning approaches by orders of magnitude in terms of training time, solution quality, and robustness to hyperparameter tuning, while maintaining similar inference times. Finally, we tackle multi-vehicle motion planning with non-convex trajectory preferences and provide Πnet as a GPU-ready package implemented in JAX.
- Variational Analysis in the Wasserstein Space Preprint · 2024L. Nicolas*, A. Terpin*, F. Dörfler
Abstract ↓
We study optimization problems whereby the optimization variable is a probability measure. Since the probability space is not a vector space, many classical and powerful methods for optimization (e.g., gradients) are of little help. Thus, one typically resorts to the abstract machinery of infinite-dimensional analysis or other ad-hoc methodologies, not tailored to the probability space, which however involve projections or rely on convexity-type assumptions. We believe instead that these problems call for a comprehensive methodological framework for calculus in probability spaces. In this work, we combine ideas from optimal transport, variational analysis, and Wasserstein gradient flows to equip the Wasserstein space (i.e., the space of probability measures endowed with the Wasserstein distance) with a variational structure, both by combining and extending existing results and introducing novel tools. Our theoretical analysis culminates in very general necessary optimality conditions for optimality. Notably, our conditions (i) resemble the rationales of Euclidean spaces, such as the Karush–Kuhn–Tucker and Lagrange conditions, (ii) are intuitive, informative, and easy to study, and (iii) yield closed-form solutions or can be used to design computationally attractive algorithms. We believe this framework lays the foundation for new algorithmic and theoretical advancements in the study of optimization problems in probability spaces, which we exemplify with numerous case studies and applications to machine learning, drug discovery, and distributionally robust optimization.
- Most readDynamic Programming in Probability Spaces via Optimal Transport SIAM SICON 2023A. Terpin*, N. Lanzetti*, F. Dörfler
Abstract ↓
We study discrete-time finite-horizon optimal control problems in probability spaces, whereby the state of the system is a probability measure. We show that, in many instances, the solution of dynamic programming in probability spaces results from two ingredients: (i) the solution of dynamic programming in the "ground space" (i.e., the space on which the probability measures live) and (ii) the solution of an optimal transport problem. From a multi-agent control perspective, a separation principle holds: the "low-level control of the agents of the fleet" (how does one reach the destination?) and "fleet-level control" (who goes where?) are decoupled.